近日,我院辛洪宝教授等在光学控制生物微马达研究中取得了重要进展,构建出活的生物微马达,将其用于唾液、血浆、血清、血液、骨髓液等不同生物环境中,实现了对生物目标物的非接触操控、靶向递送、可控降解与移除。相关工作发表在国际学术期刊 Nano Letters(文章链接)。
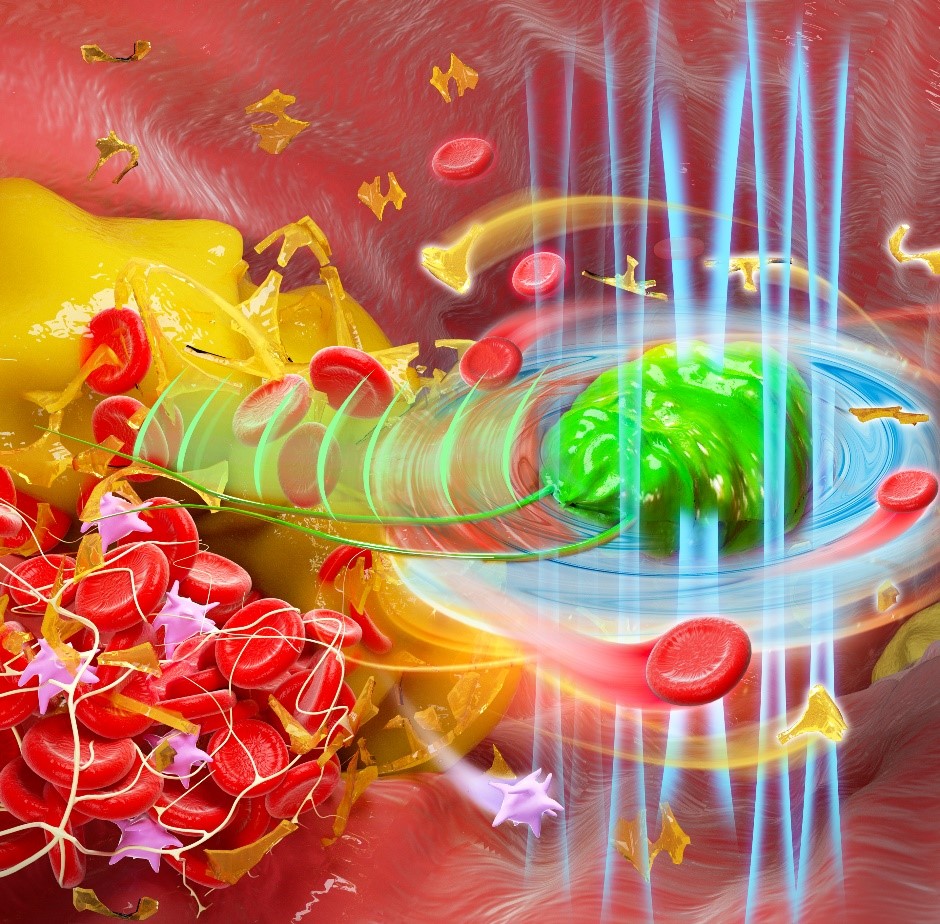
深入人体内部进行精准显微手术与治疗是人类在医疗健康领域一直追寻的目标,微马达与微型机器人的诞生使得这一梦想成为了可能,因为其极小的体积和极佳的驱动与导航特性使其能够在传统医学工具无法到达的微小空间中进行无侵害地航行。然而,传统微马达的驱动与导航或多或少要依赖于合成材料,而合成材料的使用大大降低了其在生物系统中的兼容性。因此,不依赖于合成材料的全生物多功能微马达的构建十分有必要。为此,我院辛洪宝教授等利用扫描光镊技术,以衣藻这种生物细胞为材料,构建出活的生物微马达个体与阵列,实现了其在唾液、血浆、血清、血液、骨髓液等不同生物环境中的可控驱动与定向导航,以及对生物目标物的非接触操控、靶向递送、可控释放及包括血块在内的有害生物聚集体的降解与移除等。这种活的多功能生物微马达为构建生物兼容的智能微纳生物机器人提供了新思路,为生物环境中药物递送与释放、血管中血栓移除、体内精准微手术等提供了新方法。