近日,我院辛洪宝教授等在光控微纳生物机器人领域中取得重要进展,他们提出了一种基于光学导航旋转的光流体力硅藻机器人,实现了能直接用于神经细胞等珍贵细胞培养过程中病毒、支原体和致病菌等纳米生物威胁物的非侵入捕获、收集与移除。相关成果发表在国际学术期刊 Advanced Science(论文链接)。论文第一作者为纳米光子学研究院博士生熊建云,李宝军教授和辛洪宝教授为共同通讯作者。
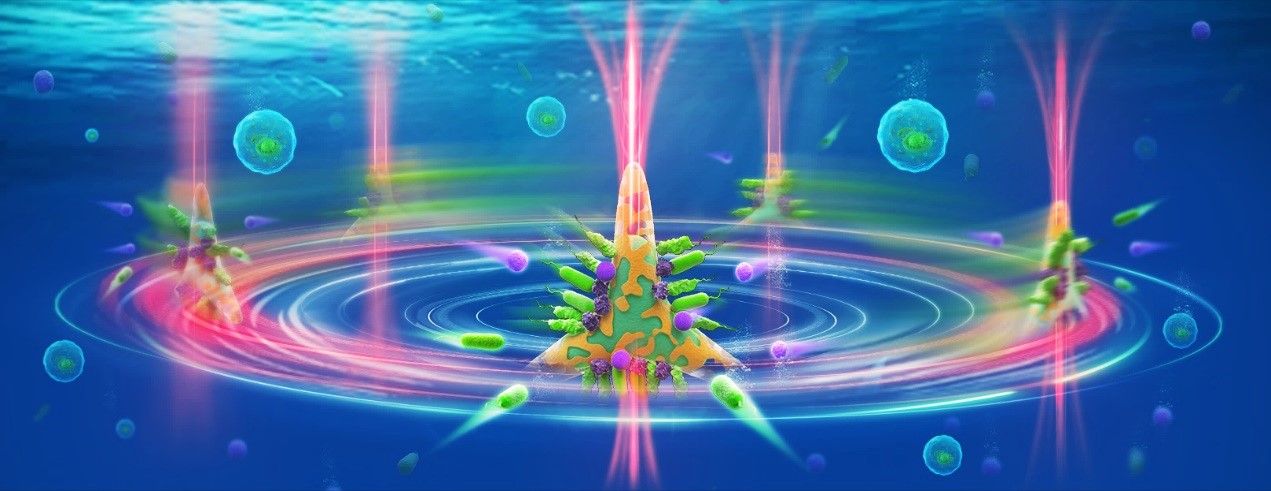
细胞培养过程中病毒、支原体和致病菌等纳米生物威胁物的污染给很多与细胞分析相关的生物医学应用造成了极大的威胁。虽然传统的紫外杀菌和酒精消毒可以有效用于细胞培养前的生物威胁物的移除,但对于细胞培养和操作过程中产生的污染,这些方法会直接伤害我们需要的细胞,尤其会对原代神经元等珍贵细胞造成不可逆转的损害,使得这些生物威胁物的移除极具挑战。然而,由于病毒、致病菌等强大的繁殖能力,极少的污染也会迅速破坏目标细胞,往往会给生物医学研究及生物制造带来毁灭性的破坏和巨大的经济损失。针对这一问题,受自然界中海豚可以轻松追随行船的尾浪而借力前行(船尾乘浪效应)的启发,李宝军教授、辛洪宝教授等提出了一种生物相容的光流体力硅藻机器人策略。通过光力将一个具有三指形状的硅藻(三角褐指藻)旋转起来,构建成硅藻机器人,硅藻机器人周围局部流场产生的光水动力可以轻松将尺寸小至100 nm的目标物进行捕获与收集。该方法可在不影响细胞生命状态的情况下,直接智能且非侵害地移除神经细胞细胞培养过程中污染的病毒、支原体、致病菌等生物威胁物。更重要的是,通过壳聚糖包被的光流体力硅藻机器人表现出高效抗菌能力,在受污染的细胞中,在移除污染细菌的同时还可以实现高效杀菌,助力受污染细胞的靶向基因递送和神经细胞生长调控等应用。该方法为细胞(特别是无法使用抗生素的神经细胞等珍贵细胞)培养过程中生物威胁物的移除提供了全新的工具,将助力基于活细胞研究的生物制造、疫苗研制等生物医学应用。